PRODUCTS
NIRC2 Narrow Camera Distortion Solution (Yelda et al. 2010)All files are zipped FITS files of size 1024 x 1024 pixels, with each pixel specifying the required shift (in pixels) to undistort an image. Uncertainty MapsNOTE! Uncertainty maps include both statistical measurement uncertainty and residual systematic uncertainty which has a magnitude of 0.1 pix. Description of Distortion Solution
Details on the creation, testing, and application of the NIRC2 narrow camera distortion
solution can be found in Yelda et al. (2010).
Here we highlight some of the details.
How to Use this Solution with Drizzle:
Python code to undistort individual frames using the IRAF package
drizzle: nirc2dewarp.py (Last updated: 2010 Nov. 20)
How to rotate images to get North up:Position Angle |
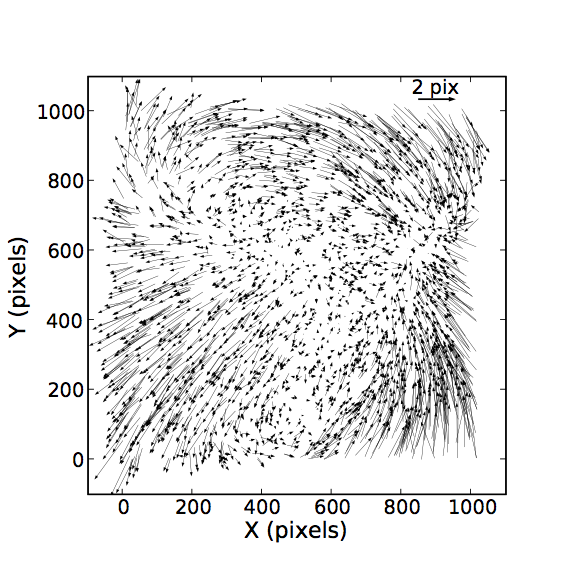
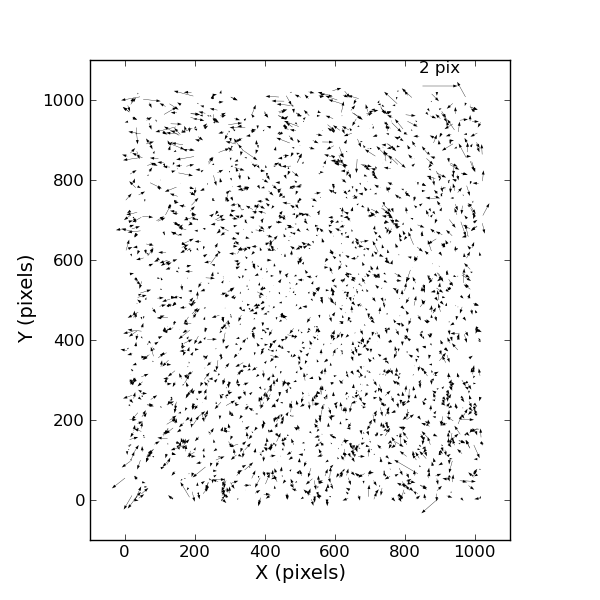
Top: Optical distortion in the NIRC2 camera obtained from positional measurements of stars in the globular cluster M92. Arrows indicate the difference between measurements made with NIRC2 (arrow tail) and ACS/WFC (arrow head), which has a well characterized distortion solution to the ~0.5 mas level (Anderson et al. 2006, Anderson et al. 2007). Bottom: Post-fit residuals after applying a 3rd-order bivariate smoothing spline to the distortion map. Typical residuals are on the order of 0.1 pix (~1 mas). 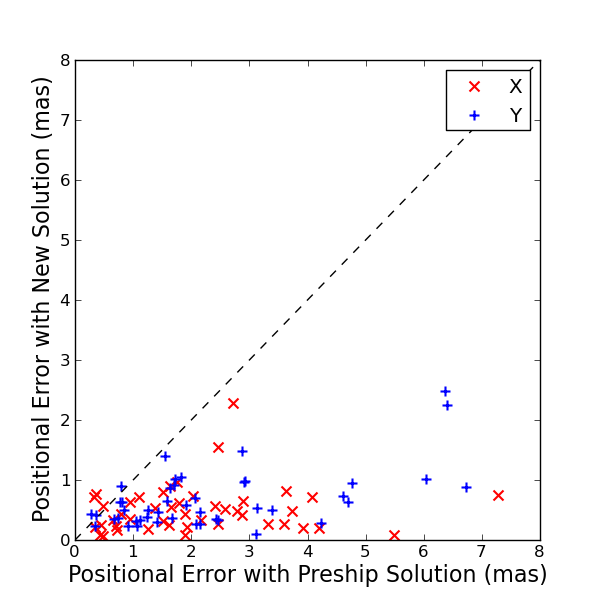
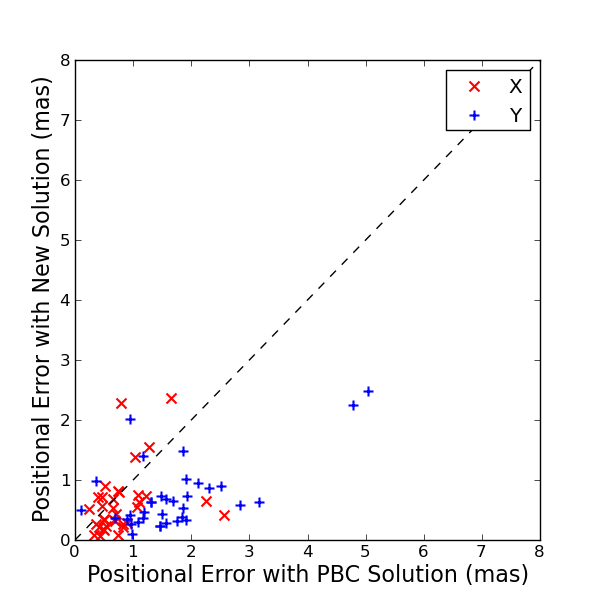
Positional errors of Galactic center stars using the new distortion solution versus the preship solution (Top) and versus P. B. Cameron's solution (Bottom). The new solution is a factor of ~3-4 improved in both X (red crosses) and Y (blue plus signs) over the pre-ship solution and in Y over the PBC solution. |